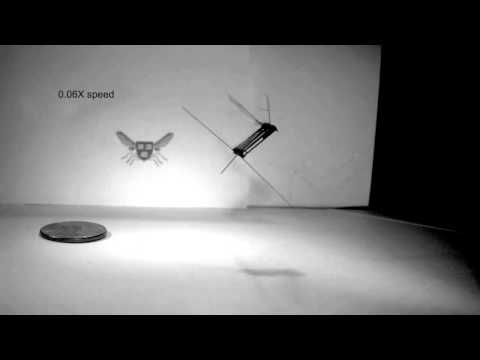
In a Harvard robotics laboratory, inspired by the biology of a fly, robotic insect RoboBee achieves vertical takeoff, hovering, and steering. It is the world's smallest flying robotic insect and it has taken 12 years to get the robot into the air. The work was led by researchers at the Harvard School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering.
PD-100 Black Hornet PRS Nano Unmanned Air Vehicle has been developed by Prox Dynamics AS of Norway. It is about 100 mm long (rotor span 120 mm), and weighs 16 grams including a camera. The Black Hornet has a range of 1000 meters, can fly for 25 minutes at maximum speed 10 m/s, and is ready to fly within one minute.

The team has gone through 20 prototypes.
It's really only because of this lab's recent breakthroughs in manufacturing, materials, and design that we have even been able to try this. And it just worked, spectacularly well.
says Robert J. Wood, Charles River Professor of Engineering and Applied Sciences at SEAS, Wyss Core Faculty Member, and principal investigator of the National Science Foundation-supported RoboBee project.
The tiny robot flaps the two wafer-thin wings 120 times per second with piezoelectric actuators - strips of ceramic that expand and contract when an electric field is applied. Thin hinges of plastic embedded within the carbon fiber body frame serve as joints, and a delicately balanced control system commands the rotational motions in the flapping-wing robot, with each wing controlled independently in real-time.
Large robots can run on electromagnetic motors, but at this small scale you have to come up with an alternative, and there wasn't one,
says co-lead author Kevin Y. Ma, a graduate student at SEAS.
The control system is wired in from a separate computer and it has to react very fast to remain stable, because at tiny scales, small changes in airflow can have an outsized effect on flight dynamics. The prototype is still powered by a very thin cable because there are no solutions for energy storage that are small enough to be mounted on the RoboBee body.

Applications of the RoboBee project could include distributed environmental monitoring, search-and-rescue operations, or assistance with crop pollination.
The video below shows a series of early, uncontrolled takeoff tests proving that the vehicle can generate enough lift to overcome its own weight; however no stability control is implemented.
Comments