Theodorus Gerardus Jozef "Theo" Jansen is a Dutch artist. Theo Jansen's
mechanism (named strandbeest - "beach animal") allows to perform
walking motion. The advantage is that the required power of the engine
used in the mechanism, must be sufficient to transfer only the legs (not
transported elements). He invented that in 1991.
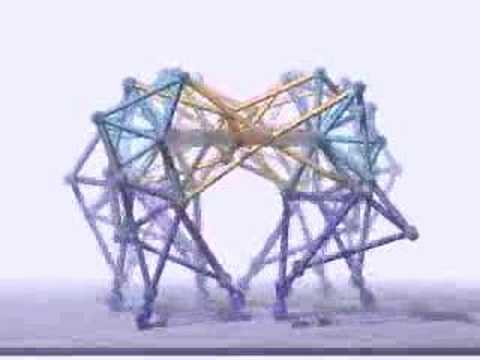




Simulation of Theo Jansen's mechanism:
Author gives dimensions of the legs:
a=38, b=41.5, c=39.3, d=40.1, e=55.8, f=39.4, g=36.7, h=65.7, i=49, j=50, k=61.9, l=7.8, m=15

Take a look at the video below to see Theo's explanation about the Strandbeest legsystem.
Sample mechatronic project using the Theo Jansen's mechanism:
Take a look at Land Crawler eXtreme Locomotion. As the designer said:
I made this just for my son (2 years old), because he told me "Dad! I wand to ride on a robot". This is just a toy for my son.
This mechanical link is based on Theo Jansen's designe.
LCX was designed to allow 360kg static weight and able to locomote with 90kg. Over 90kg, it is not tested but may it works. LCX is controlled by both wired remote controller and center of weight sensor. It's power sorce is 7.2V Ni-H battery that is used to RC and locomote 45min with human ride.
Comments