We are increasingly accustomed to using e-books and each book is now released in a digital version too. Progressive digitization of the world around us causes the demand for devices to enable the digitization of paper books, official documents, and notes. However, the conventional technology can not meet the demands for ease-of-use and high-speed book digitization. Ishikawa Oku Laboratory at the University of Tokyo works on a solution.
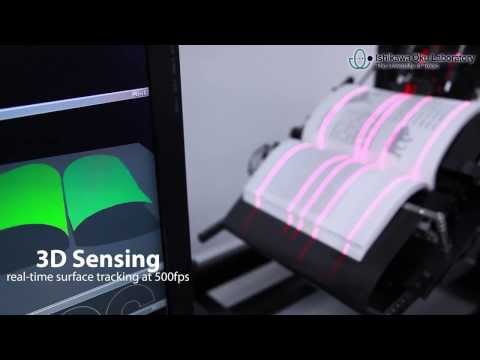
There is a growing demand for camera-based document analysis and recognition and there emerges a solution to the speed of book scanning named BFS-Auto. This device can achieve high-speed and high-definition of a book digitization at over 4 pages/sec. This performance is realized by three key points:
- high-speed fully-automated page flipping,
- real-time 3D recognition of the flipped pages,
- high-accuracy restoration to a flat document image.


the detailed research paper has not been published and this work is collaborative research with the company so that we need to keep some details in secret.
See the video below, that shows this forward-looking and somewhat revolutionary machine in action. Optical character recognition (OCR) software will be an excellent complement for the system to convert scanned images of handwritten, typewritten or printed texts into machine-encoded texts.
Comments