A Ballbot (botball) is a mobile robot designed to balance itself on a single ball, both while in motion or staying in a place. We can say, that it is a "single wheel vehicle". The main characteristics of this kind of robots is that there’s one sole contact point to the ground. This means that the robot is inherently unstable. It’s like when you try to stand on a ball.
How ballbot keeps its balance?
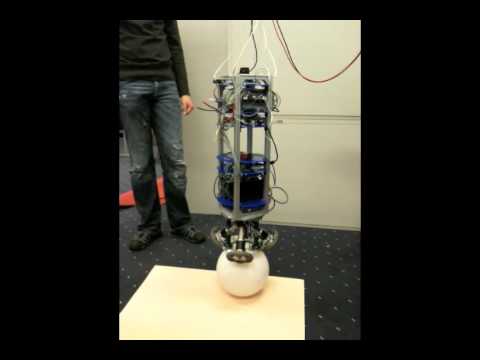
A ballbot keeps its balance by constant measuring of its pitch angle using a sensor. Then it counteracts and avoids toppling over by turning the motors appropriately. The sample frequency must be very high (about 100-200 times per second). To move and balance, it needs to turn the ball, which is driven by three wheels. This allows to move into any direction and also to move around its own axis, limited only by its dynamics but not by mechanical bindings. Therefore, it has no minimal turning radius and does not have to yaw in order to change direction. A ballbot is inherently unstable. Due to instability it is always in motion and this instability allows a ballbot to move very dynamically. To specify the desired direction of motion, for a short amount of time, the ball has to be actuated in reverse direction. Having reached a specified speed, a ballbot moves upright again. Paradoxically, for braking again, its has to build up additional speed in order to overtake its center of gravity by its ball and to reduce speed afterwards in a backwards leaning posture. A ballbot works very similar to an inverted pendulum on a cart. It has to lean into curves in order to compensate for centripetal forces which results in very smooth and elegant motions. Ballbot example: Rezero - developed by students at the Autonomous Systems Laboratory at ETH-Zurich:

Fundamental design parameters of a Ballbot are:
- height
- mass
- center of gravity
- actuators maximum torque
- friction coefficients of all parts involved in force transmission (wheels, ball)
- ball’s low inertia (massive core or hollow ball)
The choice of those parameters determine the robot's inertia, the maximum pitch angle and thus its dynamic and acceleration performance and agility.
To solve the rather complex problem of actuating a sphere without generating undesired friction most ballbots make use of:
- omni wheels
- special chains
- specials wheels
- normal wheels
- drive shafts
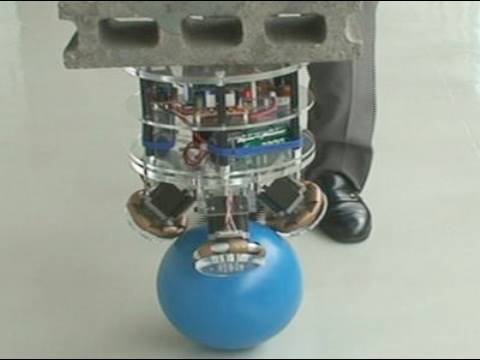
A ballbot example: BallIP (short for Ball Inverted Pendulum) developed by Dr. Masaaki Kumagai/Tohoku Gakuin University:
Applications
A ballbot could be used in public information (exhibitions, shops, parks). It could inform, describe and show people the place on a screen. In daily aid (in a hospitals) it could be used to carry around medical equipment or transporting people. The possibilities of a ballbots of applications are extensive. It could be used in industry or as a toy, too.

Comments